

液壓傳動機械手的設計一套,內容齊全(畢業設計書+CAD圖紙全套)。
內容包含:液壓傳動機械手的設計說明書、畢業設計論文、設計任務書.doc、目錄.doc、任務書.doc、裝配圖-A0.dwg、手部結構圖-A1.dwg、液壓回路圖-A1.dwg、手臂升降機構圖-A1.dwg、傳動系統圖-A2.dwg、PLC程序圖.dwg等全套
內容包含:液壓傳動機械手的設計說明書、畢業設計論文、設計任務書.doc、目錄.doc、任務書.doc、裝配圖-A0.dwg、手部結構圖-A1.dwg、液壓回路圖-A1.dwg、手臂升降機構圖-A1.dwg、傳動系統圖-A2.dwg、PLC程序圖.dwg等全套
液壓傳動機械手設計 (畢業設計全套)五度自由度液壓機械手
目 錄
1 前言
1.1 工業機器人簡介----------------------------------------------------------(1)
1.2 世界機器人的發展--------------------------------------------------------(1)
1.3 我國工業機器人的發展----------------------------------------------------(2)
1.4 我要設計的機械手--------------------------------------------------------(2)
1.4.1 臂力的確定---------------------------------------------------------------------------------------(2)
1.4.2工作范圍的確定----------------------------------------------------------------------------------(2)
1.4.3 確定運動速度--------------------------------------------------------(3)
1.4.4 手臂的配置形式------------------------------------------------------(3)
1.4.5 位置檢測裝置的選擇--------------------------------------------------(4)
1.4.6 驅動與控制方式的選擇------------------------------------------------(4)
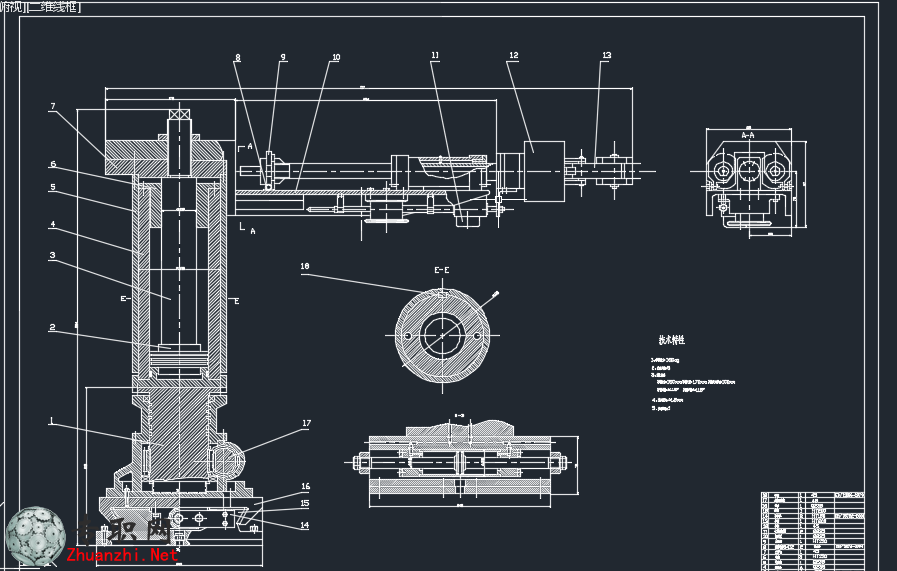
2 手部結構------------------------------------------------------------------------------------------(5)
2.1概述-------------------------------------------------------------------------------------------------------(5)
2.2 設計時應考慮的幾個問題----------------------------------------------------------------------------(5)
2.3 驅動力的計算 -----------------------------------------------------------------------------------------(5)
2.4 兩支點回轉式鉗爪的定位誤差的分析------------------------------------------------------------(8)
3 腕部的結構---------------------------------------------------------------------------------------(9)
3.1 概述------------------------------------------------------------------------------------------------------(9)
3.2 腕部的結構形式--------------------------------------------------------------------------------------(9)
3.3手腕驅動力矩的計算-----------------------------------------------------(10)
4 臂部的結構-------------------------------------------------------------------------------------(13)
4.1 概述----------------------------------------------------------------------------------------------------(13)
4.2手臂直線運動機構-----------------------------------------------------------------------------------(13)
4.2.1手臂伸縮運動------------------------------------------------------------------------------------(14)
4.2.2 導向裝置---------------------------------------------------------------------------------------(14)
4.2.3 手臂的升降運動-------------------------------------------------------------------------------(15)
4.3 手臂回轉運動----------------------------------------------------------------------------------------(16)
4.4 手臂的橫向移動-------------------------------------------------------------------------------------(16)
4.5 臂部運動驅動力計算------------------------------------------------------------------------------(17)
4.5.1 臂水平伸縮運動驅動力的計算------------------------------------------------------------(17)
4.5.2 臂垂直升降運動驅動力的計算------------------------------------------------------------(18)
4.5.3 臂部回轉運動驅動力矩的計算---------------------------------------(18)
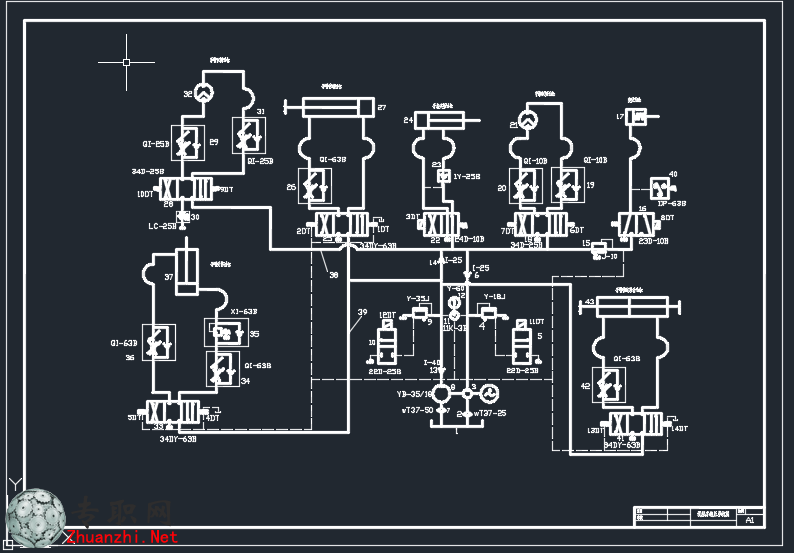
5 液壓系統的設計-----------------------------------------------------------------------------(20)
5.1液壓系統簡介---------------------------------------------------------------------------------------(20)
5.2液壓系統的組成------------------------------------------------------------------------------------(20)
5.3機械手液壓系統的控制回路---------------------------------------------(20)
5.3.1 壓力控制回路-------------------------------------------------------------------------------(20)
5.3.2 速度控制回路-------------------------------------------------------------------------------(21)
5.3.3 方向控制回路-----------------------------------------------------------------------------------(21)
5.4 機械手的液壓傳動系統----------------------------------------------------------------------------(21)
5.4.1 上料機械手的動作順序----------------------------------------------------------------------(22)
5.4.2 自動上料機械手液壓系統原理介紹-------------------------------------------------------(22)
5.5機械手液壓系統的簡單計算-----------------------------------------------(24)
5.5.1 雙作用單桿活塞油缸------------------------------------------------(25)
5.5.2 無桿活塞油缸(亦稱齒條活塞油缸)----------------------------------(27)
5.5.3 單葉片回轉油缸 ---------------------------------------------------(29)
5.5.4 油泵的選擇--------------------------------------------------------(30)
5.5.5 確定油泵電動機功率N ----------------------------------------------(31)
6 PLC控制回路的設計-----------------------------------------------------------------------(32)
6.1 電磁鐵動作順序-------------------------------------------------------------------------------------(32)
6.2 現場器件與PLC內部等效繼電器地址編號的對照表---------------------------------------(33)
6.3 PLC與現場器件的實際連接圖------------------------------------------------------------------(34)
6.4 梯形圖-------------------------------------------------------------------------------------------------(35)
6.5 指令程序-----------------------------------------------------------------------------------------------(36)
7 結束語 -----------------------------------------------------------------------------------------------------(41)
8參考文獻--------------------------------------------------------------------------------------------------(42)
9致 謝 ---------------------------------------------------------------------------------------------------(43)



 紗筒轉運車RGV小車3D模型圖紙_So
紗筒轉運車RGV小車3D模型圖紙_SolidW
紗筒轉運車RGV小車3D模型圖紙_So
紗筒轉運車RGV小車3D模型圖紙_SolidW
 非標自動化筆記本鎖螺絲機3D模型
非標自動化筆記本鎖螺絲機3D模型_Sol
非標自動化筆記本鎖螺絲機3D模型
非標自動化筆記本鎖螺絲機3D模型_Sol
 自動化折彎激光焊接設備3D模型_S
自動化折彎激光焊接設備3D模型_Solid
自動化折彎激光焊接設備3D模型_S
自動化折彎激光焊接設備3D模型_Solid
 A10-Tray自動上料抓取工位3D模型
A10-Tray自動上料抓取工位3D模型_Sol
A10-Tray自動上料抓取工位3D模型
A10-Tray自動上料抓取工位3D模型_Sol